
7 abril, 2020
Desarrolladores de Google le han enseñado a Laikago, un perro robot, como moverse.
En realidad el mérito le corresponde a un perro real, dado que el sistema se basa en un proceso de imitación.
La imitación ha aparecido como la mejor opción para aprender las habilidades de movimiento en seres humanos y animales.
Proceso
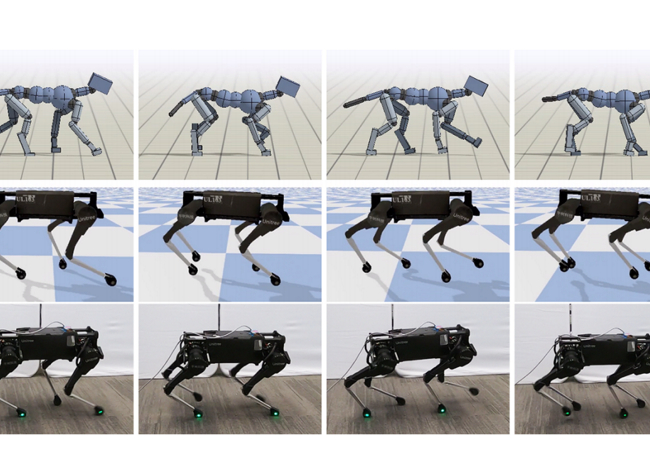
Para esta tarea se instalaron una serie de dispositivos de captura de movimiento en un animal.
Esto permitió construir una simulación de cada maniobra realizada. Caminar puede parecer una operación sencilla, pero no lo es. No es lo mismo ir lentamente que al trote, o realizar un paso al costado.
Los investigadores también agregaron movimientos artificiales, creados a través de la animación del perro simulado. Aunque estas opciones no se trasladaron a la versión final.
A continuación establecieron las correspondencias entre las articulaciones de la simulación y el robot.
Un esquema de aprendizaje reforzado permitió a modelo virtual del robot aprender como estabilizarse y corregir diferencias de peso y diseño. Después de todo un perro robot no es un perro de carne y hueso.
Como último paso se instaló el algoritmo de control en el robot.
Desafíos a futuro
Aunque la imitación es un mecanismo prometedor tiene algunos límites. De principio, como hemos señalado, los seres vivos y los robots pueden ser similares pero no son idénticos. La captura de movimiento es un proceso costoso y depende de la actitud del animal, por lo que por lo general está limitada a animales domésticos.
Una alternativa que se está considerando es la captura de los movimientos a través del video.